
TELENOID
Osaka University and Advanced Telecommunications Research Institute International (ATR) have collaboratively developed a new portable teleoperated android robot, “Telenoid™ R1,” that can effectively transfer peoples’ presence.
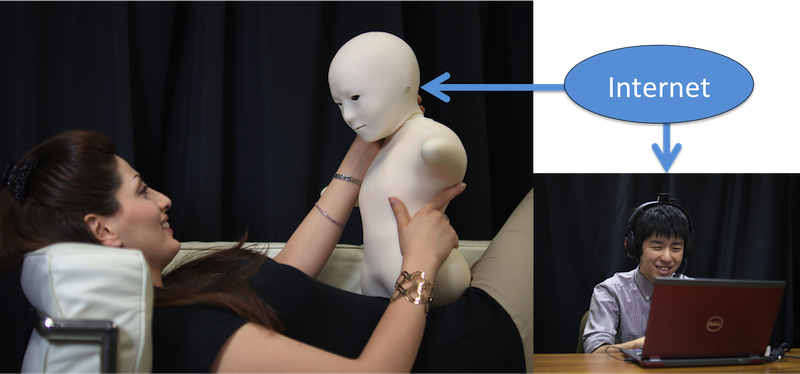
Teleoperated android robots in the past, such as Geminoid™ HI-1 (developed by ATR) and Geminoid™ F (developed by Osaka Univ. and ATR) owned appearances similar to actual persons, and were intended to transfer presences of actual persons. The new Telenoid™ R1 was designed to appear and to behave as a minimalistic human; at the very first glance, one can easily recognize the Telenoid™ as a human while the Telenoid™ appear as both male and female, as both old and young. By this minimal design, the Telenoid™ allows people to feel as if an acquaintance in the distance is next to you. Moreover, Telenoid™’s soft and pleasant skin texture and small, child-like body size allows one to enjoy hugging and communicating with it easily.
The term Telenoid™ is a new term coined from a prefix Tele-, as Telephone and Teleoperation, and the Latin postfix -oides which indicates similarity, as Humanoid. Using Telenoid™s, we will investigate the essential elements for representing and transferring humanlike presence. In practical usage, we expect Telenoid™ to be used as a new communication media,
Features of Telenoid™ R1 include:
- A novel minimalistic design that can effectively represent human presence
- Soft and pleasant body
- Low cost due to decreased numbers of actuators
(Telenoid™ R1:9、Geminoid™ HI-1:50、Geminoid™ F:12) - Small-size body and simple internal structure by use of electric (DC) motors
- Easy teleoperation based on the teleoperation technology developed by ATR
| Telenoid™ R1 | Telenoid™ R2 | Telenoid™ R2w | Telenoid™ R2l | Telenoid™ R3 | Telenoid™ R3b | Telenoid™ R4 | |
|---|---|---|---|---|---|---|---|
| Release | Aug. 2010 | Mar. 2011 | Jan. 2012 | Mar. 2012 | Nov. 2012 | Jun. 2013 | Jul. 2013 |
| Height | Approx. 80cm | Approx.70cm | Approx.50cm | ||||
| Weight | Approx. 5kg | Approx. 3kg | Approx. 4kg | Approx. 2kg | Approx. 3kg | Approx. 3.5kg | Approx. 3.5kg |
| Sensor | None | One camera, two microphones, and one posture sensor (3 axes accelerometer and 2 axes gyro) | None | two microphones | |||
| Actuator | Servo motor | ||||||
| Power | External DC power resource | Battery | External DC power resource | Battery | |||
| CPU | One microcontroller (ARM7 60Hz) is embedded. An external PC is used for Telenoid control. | One microcontroller (Arduino) is embedded. An external PC is used for Telenoid control. | One embedded computer (beaglebone) is embedded. | ||||
| Degree of freedom | 3 for eyeballs, 1 for mouth, 3 for neck, and two for amrs | 1 for mouth, two for neck, and two for arms | 3 for eyeballs, 1 for mouth, 3 for neck, and two for amrs | ||||
| Exterior material | Silicone | Polyvinyl chloride | |||||
| Improved point | Downsizing, Adding sensors, Changing exterior material | Wireless connection between Telenoid and external PC | Weight saving | Weight saving & Wireless connection between Telenoid and external PC | Embedded computer | Design change | |
Telenoid R4

Telenoid R4 is the 4th-generation Telenoid that is refined based on our observation in field studies.
-->Development of Telenoid was partially supported by Grant-in Aid for Scientific Research (S), KAKENHI (20220002) [Principal Investigator: Hiroshi Ishiguro (Professor of Osaka University, ATR fellow) and JST CREST (Core Research of Evolutional Science & Technology) research promotion program]