

Robots
 |
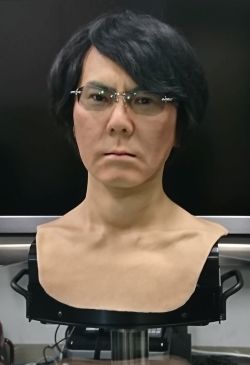
Geminoid HI-2Geminoid HI-2 is a tele-operated android that has similar appearance of original person, Hiroshi Ishiguro. Geminoid HI-2 has fifty degrees of freedom that allow Geminoid HI-2 behave like actual humans. We demonstrate to questions that "What is a human presence?" or "Can human precence transfer to a remote place?" by using Geminoid HI-2.SpecificationsHeight: 140cm (in sitting) Width: 100cm(including the floor panel) Sensors: several tactile sensors Actuators: 50 pneumatic actuators Power: External control system. Air-flow control valves to drive pneumatic actuators an air compressor DC power source to control electrical motors Computing: No processor in the body Software: system for tele operation Degrees of Freedom: Total 50 (Head: 13, Body: 15, Arms and Legs total: 22) Structure and Materials: plastic skull metal skeleton urethane foam fresh silicone skinDetailsphoto, movie |
 |
TelenoidTelenoid is a teleoperated android that adopts a minimal design of human, that is, it is designed according to minimum requirements to express humanlike appearance and motion. Its design is easily recognizable at first glance to be nothing but a human and capable of being interpreted equally as male or female, old or young, and everyone can transmit his/her own presence to a distant place.Detailsphoto, movie |
 |
ElfoidElfoid is a cellphone-type teleoperated android that follows the concept of Telenoid. Minimal design of human and soft, pleasant-to-the-touch exterior are implemented in cellular phone size. Thanks to its capability of cellular phone, everyone can easily talk with a person in the remote place while feeling as if they are facing with each other.Detailsphoto, movie |
 |
HugvieHugvie is a a "human presence" transfer media that enables users to strongly feel the presence of remote partners while interacting with them. Through research and development of other robots such as "TelenoidR R1" (press release August 2010) or "ElfoidR P1" (press release March 2011), we have found that hugging and holding these robots during an interaction is an effective way for strongly feeling the existence of a partner. "Hugvie" is an epoch-making communication medium that can strongly transfer the presence of an interaction partner despite its simple shape.Detailsphoto, moviespecial page(Kyoto Nishikawa) |
 |
ERICAERICA is an android developed as a research platform for the autonomous conversational robot. We are developing total technology to enable Erica to have natural interaction with persons by integrating various technologies such as voice recognition, human tracking, and natural motion generation. It has forty-four degrees of freedom for face, neck, arms, and waist, and can express various facial expressions and some gestural motions. Its appearance is designed for neutral female face, by which people can familiarly interact with it. It speaks in synthesized voice.SpecificationsHeight: 166cm (in standing) Shoulder width: 36cm Bust(top): 84cm Bust(under): 67cm Waist: 63cm Hip: 92cm Size of cloth: M (japanese) Actuators: 44 pneumatic actuators Language: mainly Japanesephoto, movie |
 |
Android IAndroid I is an android developed as a research platform for the autonomous conversational robot and especially used in field experiments. It has eighteen degrees of freedom for face, neck, and waist. |
Robots (not in ATR)
 |
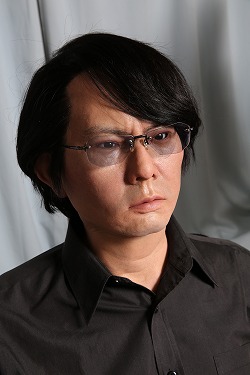
Geminoid HI-5Geminoid HI-5 is a tele-operated android head that has similar appearance of original person, Hiroshi Ishiguro. Geminoid HI-5 has sixteen degrees of freedom that allows itself to behave like actual humans. By using Geminoid HI-5, we demonstrate to questions that "What is a human presence?" and "Can human presence transfer to a remote place?"SpecificationsHeight: 50cm Width: 25cm Actuators: 16 pneumatic actuators Power: External control system. DC power source to control air-flow control valves to drive pneumatic actuators. (50W) Air compressor to supply a compressed air. (100V, 1000W) Computing: No processor in the body Software: system for tele operation Degrees of Freedom: Total 16 Structure and Materials: plastic skull metal skeleton silicone skinphoto |
 |
OtonaroidOtonaroid is Geminoid that has similar appearance to an original person. It has forty degrees of freedom and can express various facial expressions and gestural motions. To conduct a field study to investigate human-android communication and to find social rolls of android, Otonaroid has been exhibited at Miraikan (National Museum of Emerging Science and Innovation in Tokyo, Japan) since June 2014. Otonaroid has two modes; one is tele-operation mode and the other is autonomous mode. In the tele-operation mode, any visitors of Miraikan can talk with another person by operating Otonaroid. In the autonomous mode, Otonaroid speaks in synthesized voice.photo Miraikan |
 |
KodomoroidKodomoroid is a child-looking android. It has thirty degrees of freedom and can express various facial expressions and gestural motions. To conduct a field study to investigate human-android communication and to find social rolls of android, Kodomoroid has been exhibited at Miraikan (National Museum of Emerging Science and Innovation in Tokyo, Japan) since June 2014. At Miraikan, Kodomoroid works as a news presenter reading scientific news every day. Kodomoroid speaks in synthesized voice.photo Miraikan |
 |
Geminoid HI-4Geminoid HI-4 is a tele-operated android that has similar appearance of original person, Hiroshi Ishiguro. Geminoid HI-4 has sixteen degrees of freedom that allows itself to behave like actual humans. By using Geminoid HI-4, we demonstrate to questions that "What is a human presence?" and "Can human presence transfer to a remote place?"SpecificationsHeight: 140cm (in sitting), 180cm (in standing) Width: 100cm(including the floor panel in standing position) Actuators: 16 pneumatic actuators Power: External control system. DC power source to control air-flow control valves to drive pneumatic actuators. (50W) Air compressor to supply a compressed air. (100V-240V, 400W) Computing: No processor in the body Software: system for tele operation Degrees of Freedom: Total 16 (Head: 12, Body: 4) Structure and Materials: plastic skull metal skeleton urethane foam fresh silicone skinphoto |
 |
Geminoid FGeminoid F is a female type of tele-operated android that has similar appearance of original person. Geminoid F has twelve degrees of freedom to make it more cheaper and lightweight compared to Geminoid HI-2. Due to the features, Geminoid F is hoped for becoming more common communication media for everyday life.SpecificationsHeight: 165cm (sitting height: 95cm) Width: 38cm Actuators: 12 pneumatic actuators Power: same as HI-2 Computing: same as HI-2 Software: same as HI-2 Degrees of Freedom: Total 12(Head: 11, Body: 1) Structure and Materials: same as HI-2photo, movie |
